Eye of God 5.0 готов, откуда уверенность? Анализ характеристик интеллектуального вождения Song Ultra EV

«Кто будет нести ответственность за нарушения и штрафы, начисленные при использовании умного вождения? Если произойдет авария, могут ли соответствующие автомобильные компании, несущие уголовную ответственность, нести ответственность за сокрытие?» После официального объявления BYD о запуске безлимитного страхового полиса для функции навигации по городу «Глаз Бога» эта серия вопросов стала предметом горячих дискуссий среди многих автолюбителей, а также является темой, которую неоднократно задают в нашей комнате прямых трансляций.

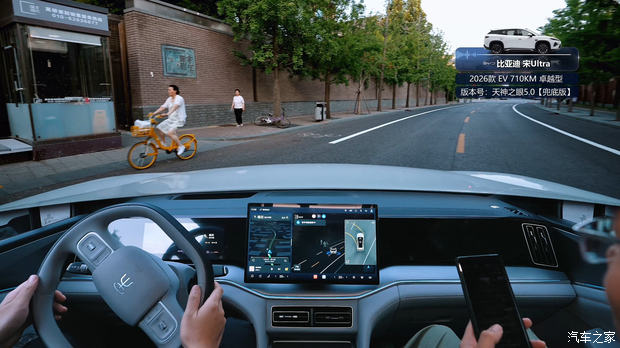
В недавней прямой трансляции вечернего пика Чикао дебютировал самый уверенный в себе BYD Song Ultra EV (параметры | запрос) в истории. Основная причина, по которой BYD называют «самым уверенным» игроком в этом опыте, — это очень актуальное обещание BYD. Мы также ранее интерпретировали подробные условия этой политики. Заинтересованные друзья могут прочитать предыдущие выпуски, чтобы узнать больше. Как только это обещание было обнародовано, все не только задавались вопросом об истинной силе интеллектуальной системы вождения «Око Божье», но у многих людей также возникли сомнения: достойна ли эта политика безопасности своего названия? Действительно ли охват является всеобъемлющим?
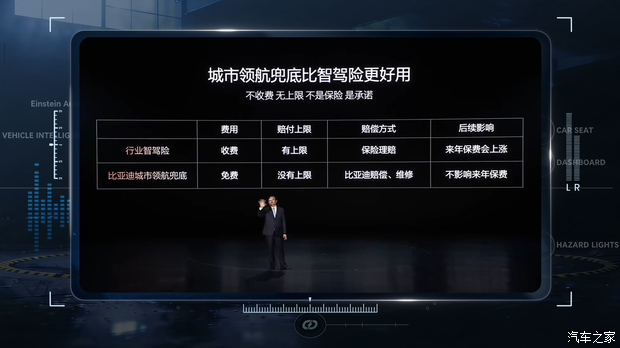
Сначала сделаем прямой вывод: в период, когда автомобиль использует функцию городского пилота, если возникнут какие-либо баллы за нарушения, штрафы, связанные с ними аварии или юридическая ответственность, ответственность за это будет нести водитель, а автомобильная компания не будет этого покрывать. Но объективно говоря, такая установка разумна. В настоящее время системы помощи водителю на рынке относятся к уровню L2. Согласно нормативным требованиям, водитель всегда является первым лицом, ответственным за управление транспортным средством. BYD запустила политику безопасности не для того, чтобы утверждать, что технология достигла уровня полностью автономного вождения, а для того, чтобы развеять опасения пользователей по поводу ее использования, чтобы каждый осмелился попробовать вождение с помощью ассистента высокого уровня, и предоставить пользователям соответствующую защиту в случае возникновения непредвиденных ситуаций, которые не вызваны злоупотреблением интеллектуальной системой вождения человеком. Пока пользователи используют его стандартизированным образом, BYD выполнит свое обещание в соответствующих сценариях.

Перед официальным выходом еще есть ключевой вопрос, который необходимо прояснить: эта политика касается только функции городской навигации, а высокоскоростная навигация не распространяется. Так как же следует определять городские дороги и автомагистрали и к какой категории относится городская кольцевая дорога? Ответ будет подробно объяснен ниже в реальном тестовом сеансе.
Друзья, которые хотят узнать подробный процесс опыта, также могут посмотреть наше полное поясняющее видео.
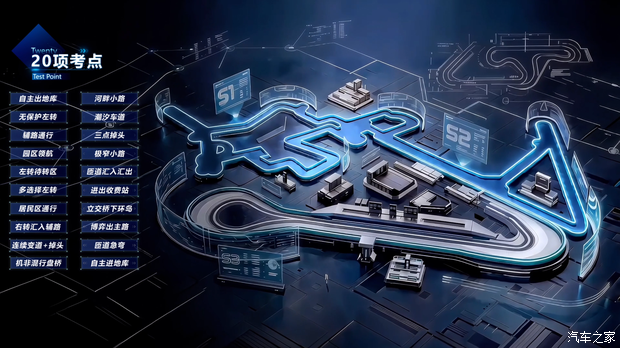
В этом опыте по-прежнему используется наш классический вечерний маршрут в час пик длиной 50 километров с интенсивным движением и полной нагрузкой. Всего создано 20 сложных сцен, охватывающих узкое дорожное движение, перегруженные участки дорог, круговые развороты, непрерывные развороты, приливные полосы, сложные извилистые мосты, высокоскоростные платные станции, движение в парках и другие разнообразные сценарии, всесторонне проверяя комплексные возможности интеллектуальной системы вождения. Далее мы поочередно разберем фактическое исполнение Song Ultra EV, оснащенного системой Eye of the God 5.0, в соответствии с последовательностью маршрутов.
Сценарий 1: Самостоятельный выход из подвала

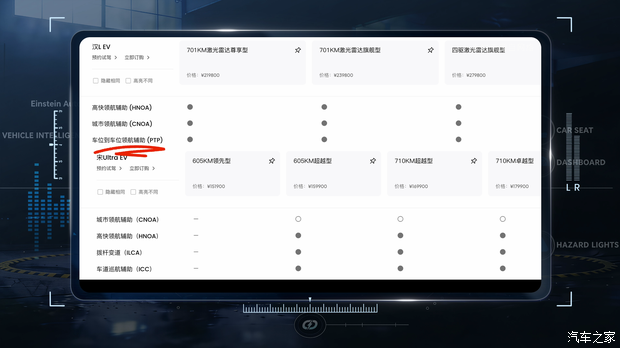
Song Ultra EV не поддерживает функцию автономного выезда из гаража. Транспортное средство необходимо вручную вывезти из гаража, что приводит к передаче управления вручную. Объединив информацию о конфигурации модели, мы обнаружили, что система God's Eye B указана в таблице конфигурации на Han L, Datang и других моделях, которые оснащены этой системой в стандартной комплектации исходного автомобиля. Хотя эта функция еще не реализована, она больше не включена в таблицу конфигурации. Более поздние модели, оснащенные God's Eye B, больше не будут включать эту функцию в таблицу конфигурации. Так обстоит дело с Song Ultra EV. Однако пока неясно, означает ли это разницу в функциях. Вы можете понаблюдать за этим при покупке автомобиля, чтобы убедиться, что это правило.
Сценарий 2: незащищенный левый поворот.

Прошло гладко. При въезде на перекресток для незащищенного поворота налево Song Ultra EV применяет стратегию вождения «от медленного к быстрому». Автомобиль медленно въезжает на перекресток и продолжает наблюдать за транспортными средствами и пешеходами, идущими прямо или разворачивающимися. После того как перекресток полностью очищен от препятствий, можно плавно завершить левый поворот. Этот набор операций эквивалентен преобразованию крайне конфронтационного незащищенного поворота налево в безопасный и надежный левый поворот без сопротивления. Общая производительность очень стабильна.
Сценарий 3: Прогулка по подъездной дороге.

Прошло гладко. После завершения поворота направо транспортному средству необходимо выехать на второстепенную дорогу. На правой стороне дороги впереди много препятствий, что затрудняет непосредственное перестроение. Song Ultra EV решает продолжать двигаться вперед. Достигнув второго въезда, транспортное средство активно замедляется и почти останавливается, прежде чем готовится выехать на подъездную дорогу, демонстрируя сильное чувство предотвращения риска. На второстепенной дороге большое количество электромобилей, которые передвигаются на высоких скоростях. Осторожный подход к входу также повышает безопасность.

Успешно выехав на подъездную дорогу, я встретил впереди стоящее такси. Хотя транспортное средство постепенно приближалось, оно все же оставалось на безопасном расстоянии и имело соответствующие пропорции. Как только появится проходное пространство, немедленно уезжайте. Позже вы также сможете точно распознавать сигналы светофора и беспрепятственно проезжать мимо.
Сценарий 4: Пилотный парк

Song Ultra EV не поддерживает функцию парковочного пилота. Система заранее подскажет, что городской пилот скорой помощи собирается выйти, когда он окажется примерно в 200 метрах от парка. Водителю необходимо взять на себя управление транспортным средством и добавить еще одно ручное управление. Что заслуживает признания, так это то, что после того, как автомобиль покинет парковку, функция городской навигации может быстро возобновить соединение, что делает работу пользователя более удобной.

Сцена 5: Зона ожидания поворота налево.

Сцена прошла без заминок. При проезде участок дороги находится в условиях подсветки, что предъявляет более высокие требования к распознаванию сигнальных огней, но Song Ultra EV по-прежнему может стабильно распознавать светофоры. Когда загорается зеленый свет для движения прямо, автомобиль трогается с места в обычном режиме и въезжает в зону ожидания левого поворота, останавливаясь точно перед стоп-линией; когда левый указатель поворота меняет цвет с красного на зеленый, он следует за транспортным потоком, трогается с места нормально и плавно переходит в соответствующую полосу движения.

Сценарий 6: поворот налево с множественным выбором

Несмотря на некоторые перипетии, общий вердикт был вынесен. Транспортное средство заранее перестроилось налево примерно в ста метрах от перекрестка и успешно выехало на выделенную полосу для левого поворота. Идите в зону под мостом, постоянно переключайтесь между двумя полосами движения и выбирайте самый крайний маршрут для обгона. Эффективность планирования маршрута отличная.

В ходе процесса также произошла небольшая ситуация: левый поворотник все еще горел красным, но идущий впереди автомобиль заранее въехал в зону ожидания. Из-за ограниченного обзора временная опора под мостом блокировала прямолинейный сигнал. Система не смогла распознать статус сигнала и не пересекла стоп-линию. Мы могли осуществить только эффективное поглощение. Водители-люди могут всесторонне оценивать дорожные условия на основе окружающего транспортного потока, но возможности интеллектуальной системы вождения по анализу окружающей среды по-прежнему имеют определенные ограничения. После того как следующие транспортные средства распознают скрытый указатель левого поворота, они вовремя следуют за транспортным потоком. Хотя в этом процессе были некоторые неожиданные повороты, ошибок в выборе основного маршрута не было, и место происшествия было признано пройденным.
Сценарий 7: Проезд в жилом районе

Сцена прошла без заминок. Смешение людей и транспортных средств в жилых районах всегда было классической и сложной сценой для интеллектуального вождения высокого класса. В настоящее время большинство основных интеллектуальных систем вождения глубоко оптимизированы для таких сложных игровых сценариев, и лишь несколько моделей допустили ошибки. Eye of the God 5.0 имеет характерный стиль вождения. Общая скорость не быстрая, но на протяжении всего пути останавливаться и ждать не приходится. Управление дроссельной заслонкой автомобиля очень точное. Он активно тормозит, когда пора уступить дорогу пешеходам и транспортным средствам, и плавно объезжает при столкновении с препятствиями. Состояние вождения стабильное и спокойное, как у опытного водителя, который может спокойно проехать и успешно выполнить поставленную задачу.
Сцена 8: Поверните направо, чтобы выехать на подъездную дорогу.

Сцена прошла без заминок. При приближении к перекрестку автомобиль постоянно объезжает окружающие препятствия транспортные средства и следует за автомобилем впереди до перекрестка. Из-за большого потока транспорта на второстепенной дороге поворачивать направо он не спешил. Вместо этого он медленно выглянул, наблюдая за встречным транспортом. Убедившись, что время пришло, он решительно повернул в нужном направлении, нажал на педаль газа и аккуратно завершил поворот направо.
Сцена 9: Постоянная смена полосы движения + разворот под мостом.

Сцена прошла без заминок. После того, как кузов был выпрямлен, автомобиль сразу же перестроился по диагонали, воспользовался разрывом в движении позади него, чтобы постоянно перестраиваться влево, и выехал на самую внутреннюю полосу, готовясь к развороту. Увидев знак разворота, автомобиль плавно замедлил ход и выехал на территорию под мостом.

В ожидании перерыва в транспортном потоке на второстепенной дороге компьютер автомобиля выдал подсказку, информирующую водителя о том, что система скоро будет понижена и разворот необходимо завершить вручную. Однако после того, как идущий впереди автомобиль начал движение, функция пилотирования немедленно восстановилась без какой-либо реальной необходимости ручного вмешательства. Затем транспортное средство самостоятельно развернулось и выехало на подъездную дорогу.

Сценарий 10: Смешанная работа машин и немашин на мосту

Основной участок дороги прошел гладко. После въезда на съезд автомобиль постепенно замедляется и следует за движением транспорта на мосту. Перед поворотом он подтвердит, что дорожные условия на правой задней стороне безопасны. В течение всего процесса пересечения моста определение маршрута транспортного средства точное, а ритм движения стабильный. В слепой зоне, где встречаются автомобили и немоторные транспортные средства, автомобиль также будет активно замедляться и наблюдать, чтобы обеспечить безопасность.

После того как извилистый мост был снесен, движение на главной дороге стало плотным, и окружающим машинам не хватило места для проезда. Song Ultra EV все еще пыталась найти проходной отрыв. Во время игры с большими автобусами действия были несколько радикальными. Во избежание риска появления царапин мы провели безопасный прием. При подъезде к развилке дороги идущий вправо автомобиль заблокировал дорожную разметку. Транспортное средство ошиблось и выехало на проезжую полосу, что привело к еще одному выезду на встречную полосу.
Сцена 11: Тропа у реки

Сцена прошла без заминок. Дорога вдоль реки имеет скрытые перекрестки, извилистые дороги и частое движение транспорта, что делает ее довольно сложной. По ходу движения также появились два ретроградных автомобиля, перегородившие путь движения. Песня Ultra EV не заставила себя долго ждать на месте. Вместо этого он дождался освобождения встречного движения, затем пересек желтую линию и активно объехал. Стратегия реагирования была очень гибкой.

Выехав на небольшую дорогу, транспортные средства могут непрерывно объезжать двухколесные транспортные средства, трехколесные транспортные средства, четырехколесные автомобили и даже пешеходов и домашних животных на обочине дороги, при этом скорость транспортного средства контролируется разумно. При повороте он может встречать крупные транспортные средства на близком расстоянии, при этом дистанция контролируется в самый раз. В условиях ограниченной ширины дороги вся система по-прежнему сохраняет хорошую эффективность движения. Стиль вождения уверенный и устойчивый, скорость увеличивается соответствующим образом, но без безрассудства. В конце участка дороги произошло кратковременное противостояние машин, но оно не повлияло на общую производительность, и сцена была успешно пройдена.
Сцена 12: Приливный переулок

На приливных полосах Song Ultra EV не используется активно и ведет себя более осторожно. Однако для завершения операции разворота на перекрестке транспортное средство нормально въехало в конец приливной полосы, обошло транспортное средство впереди и позади него и не въехало в зону ретроградного движения. Весь процесс был стандартизирован, и сцена прошла гладко.
Сцена 13: Разворот в три часа.
Столкнувшись с трехточечным разворотом посреди дороги, Eye of the God 5.0 показал достаточную уверенность. Транспортное средство заранее замедляется, поворачивает в сторону, когда достигает назначенного положения, ждет, пока пешеходы впереди и сзади пройдут, а затем переключается на заднюю передачу, чтобы завершить разворот, который является эффективным и плавным.

На обратном пути машины подъехали к железнодорожному переезду. Очереди на месте происшествия не было, но система не смогла определить правила дорожного движения и заглохла на месте. Мы провели эффективное поглощение. После того, как были подняты перила и поезд тронулся, машина обнаружила, что впереди тупик, еще раз самостоятельно совершила трехточечный разворот и плавно выехала. В этой специально созданной сложной сцене Song Ultra EV стала первой полностью автономной моделью и показала себя очень хорошо.

Сцена 14: Очень узкая дорога.

Сцену Song Ultra пройти не удалось. По обеим сторонам этого участка дороги есть парковочные места, площадь парковки для транспортных средств составляет менее полуметра, что делает пространство очень тесным. Song Ultra EV застрял при попытке повернуть налево под прямым углом на узкую дорогу. Он не развернулся, чтобы выйти, и не попытался пройти вперед. Оно сохранялось долгое время, и мы провели пятое поглощение эффективности. Однако последующие автомобили вели себя нормально при движении по узким дорогам, точно оценивая расстояние и умеренную скорость, и успешно избегали грузовиков, зондирующих обочину.

Сцена 15: Въездной и выездной пандус.

Сцена прошла без заминок. При движении здесь функциональная метка интерфейса центрального управления SR переключается с «городского пилотирования» на «высокоскоростное пилотирование», что также подтверждает наше предыдущее суждение: система будет оценивать замкнутый городской контур без светофоров как высокоскоростное пилотирование, что не входит в сферу действия политики; кольцевые дороги и скоростные автомагистрали со светофорами будут отнесены к городскому пилотированию.

Прежде чем подготовиться к выезду, автомобиль заранее выезжает на крайнюю правую полосу, чтобы подготовиться к выезду с главной дороги. Выезжайте на трехсторонний перекресток, аккуратно выберите среднюю полосу и выезжайте на съезд моста. На этапе слияния съезда вливайтесь в транспортный поток в строгом соответствии с правилами дорожного движения. После выезда на главную полосу шоссе моя первая попытка перестроиться была заблокирована автомобилем позади меня. Автомобиль не стал слепо перекрывать движение. После небольшого ожидания я успешно завершил смену полосы движения до зоны сплошной линии.
Сцена 16: Въезд и выезд на пункт взимания платы за проезд

Сцена работает нормально. Eye of God 5.0 может идентифицировать и различать полосы движения ETC, а в состоянии пилотирования автоматически выравниваться и двигаться по соответствующей полосе. Поскольку транспортное средство для этого опыта не было оборудовано оборудованием ETC, нам пришлось вручную взять его под свой контроль и проехать через ручное окно, чтобы завершить проезд.
Сцена 17: Кольцевая развязка под эстакадой
Сцена прошла без заминок. Перед выездом на кольцевую развязку автомобиль активно тормозит, переходит в режим осторожного движения, аккуратно заезжает на кольцевую развязку и совершает объезд по маршруту. Транспортное средство плавно ускоряется и замедляется, выбор маршрута разумен. Даже если поток транспорта невелик, он все равно сохраняет стабильный ритм движения, а общий контроль очень обнадеживает.
Сцена 18: Азартные игры на главной полосе

Прошло гладко. Расстояние между въездами и съездами с главной дороги здесь небольшое, а время смены полосы движения велико. Song Ultra EV последовал за идущей впереди машиной, нашел нужный момент, слегка замедлился в разрыве между соседними автомобилями, пересекающими линию, свернул влево и плавно выехал с главной дороги. В сложных дорожных условиях он легко справился с игрой.
Сцена 19: Крутой поворот на съезде.

Прошло также гладко. Автомобиль выбирает среднюю полосу и въезжает на крутой поворот съезда, при этом маршрут движения является центрированным и регулярным. Система не придерживается фиксированной скорости, а регулирует скорость движения в реальном времени в соответствии с кривизной кривой. Движения деликатные, движение выполняется эффективно.
Сцена 20: Самостоятельный вход в подвал

Как и автономная библиотека выхода, Song Ultra не поддерживает эту функцию, что приводит к окончательному поглощению. Примерно в 100 метрах от входа в подвал система заранее выдаст подсказку, информирующую о том, что пилотная функция вот-вот выйдет из строя, и водителю необходимо заранее взять на себя управление транспортным средством, и, наконец, автомобиль вручную загонят в гараж.
Общий обзор производительности
После всего 50-километрового пробега по 20 сценариям Song Ultra EV совершил в общей сложности 8 ручных перехватов и успешно прошел 16 сцен. Его комплексные характеристики вошли в число лучших среди тестовых моделей.

Среди восьми записей о поглощениях только одно было безопасным, а другое — неправильным поглощением. Остальные шесть компаний, по понятным причинам, были эффективными поглощениями. На протяжении всего процесса не было никаких опасных сцен вождения, а ходовые качества были стабильными. Ранее в марте мы тестировали Equation Leopard Titanium 7, оснащенный той же системой God's Eye 5.0. По сравнению с этим прогресс Song Ultra EV весьма очевиден. Новая версия системы не только всесторонне улучшает согласованность вождения, эффективность дорожного движения и плавность хода, но также делает ее мыслительные и обрабатывающие способности более надежными при столкновении с различными редкими сценариями, демонстрируя свою впечатляющую техническую мощь.

В настоящее время вся отрасль уделяет пристальное внимание внедрению Tesla FSD. Тем не менее, BYD со своей серией «Око Бога» и политикой городских пилотов стала первой рыбой, которая всколыхнула отечественный рынок интеллектуального вождения высокого класса. Единственная ложка дегтя заключается в том, что в Song Ultra EV в настоящее время отсутствует функция помощи при навигации по парковочному месту. Если в будущем эта возможность будет дополнена через OTA, рыночная конкурентоспособность системы Eye of God B достигнет более высокого уровня.
С учетом реальных испытаний и цен дополнительная цена этой интеллектуальной системы вождения Eye of God B составляет 12 000 юаней. Столкнувшись с этим высококачественным решением для интеллектуального вождения с реальной защитой и выдающейся общей производительностью, готовы ли вы выбрать его? Не стесняйтесь поделиться своим мнением в области комментариев.
Вот и все по этому вопросу. Это студия умных автомобилей, где каждую неделю стартует Smart Driving. До встречи в следующем прямом эфире.
По материалам autohome.com.cn





